Spanish
Spanish  Chinese
Chinese  Russian
Russian  German
German  French
French  Japanese
Japanese  Portuguese
Portuguese  Hindi
Hindi Research Article, J Fashion Technol Textile Eng S Vol: 0 Issue: 4
A Smart Garment for Gait Analysis
Gokmen Ascioglu1*, Yavuz Senol2 and Duygu Erdem3
1Dokuz Eylul University, Graduate School of Natural and Applied Sciences, Department of Electrical and Electronics Engineering, Turkey
2Dokuz Eylul University, Engineering Faculty, Department of Electrical and Electronics Engineering, Turkey
3Dokuz Eylul University, Engineering Faculty, Department of Textile Engineering, Turkey
*Corresponding Author : Gokmen Ascioglu
Dokuz Eylul University, Graduate School of Natural and Applied Sciences, Department of Electrical and Electronics Engineering, Turkey
E-mail: gokmen.ascioglu@ogr.deu.edu.tr
Received: December 01, 2017 Accepted: January 13, 2018 Published: January 18, 2018
Citation: Ascioglu G, Senol Y, Erdem D (2018) A Smart Garment for Gait Analysis. J Fashion Technol Textile Eng S4:004. doi:10.4172/2329-9568.S4-004
Abstract
Joint angles reveal useful information for diagnosis and treatment of some diseases. These are collected with camera-based systems in private rooms. However, these systems have disadvantages including expensive equipment, limited movement area and only indoor use. To overcome these issues, a smart garment is presented to collect knee and ankle joint angles of both legs. With this purpose, accelerometers were placed into garment and obtained raw data was converted into joint angles using scalar product formula. Five subjects participated in experiments and performed level walking, sit-to-stand and stand-to-sit processes. A comparison was done between calculated joint angles by designed system and measured joint angles by single-camera. Overall accuracy of designed system is well over 95%.
Keywords: Gait analysis; Smart garment; Joint angle; Accelerometer
Introduction
Gait analysis offers a unique and powerful opportunity to clinicians for assessment of medical diseases and conditions. It reveals the key information to find the best treatment in rehabilitation applications and early diagnosis of some diseases in health sciences [1-3]. For instance; therapists can evaluate patients’ rehabilitation progress after a stroke surgery and corresponding treatment can be optimized for expected healing process, and physicians can monitor different Parkinson’s disease (PD) stages and evaluate motor complications using gait characteristics [4,5].
There are different platforms to monitor the characteristics of gait analysis. Most reliable one is gait analysis laboratory based on multicamera motion capture systems and force platforms. However, these laboratories have disadvantages which include expensive equipment, limited moving area, lengthy setup process and only indoor use. Moreover, individuals always feel uncomfortable during the data collection process in clinical conditions due to the burdensome equipment and controlled environment. Therefore, they cannot demonstrate their own regular walking.
The other system is based on a single-camera motion capture system which is called Microsoft Kinect sensor. It has gained importance as gait monitoring tool in recent years. This sensor can track motion using its depth sensor and give position of body joints in 3D space. Various gait characteristics including joint angle, stride length, walking speed, etc., can be extracted from the recordings [6-8]. Despite being a cheap and portable hardware, Kinect sensor is not sufficient to overcome issues such as limited moving area and only indoor use.
With recent developments in sensor technology, wearable systems have begun to play a key role to overcome all the disadvantages of camera based systems. Textile products are combined with sensors placed on different parts of the human body. Captured raw signals by sensors are converted into gait characteristics such as walking speed, joint angles, stride length, and ground reaction forces with signal processing techniques. The most popular sensors used in gait analysis applications are accelerometers, gyroscope, force sensitive resistors, electromyography. Liu et al. [9] presented a mobile gait monitoring system including accelerometer and gyroscope. Crea et al. [10] introduced a sensorized insole for real-time monitoring of pressure distribution during movement. Wenyao et al. [11] designed a smart insole for gait analysis in daily life instead of participating in gait lab experiments.
This paper presents a smart garment to collect knee and ankle joint angles in daily activities. Smart garment consisted of a tight and a belt which was designed to improve the walking comfort and mobility of the user. Accelerometers were positioned on lower and upper parts of related joints on thigh. Data acquisition system was placed onto belt with a kangaroo pocket. Triple accelerometer outputs were used to calculate joint angles with scalar product technique. Five healthy subjects from university staff and students were participated voluntarily in data collection experiments. Each one performed three processes including level walking, sit-to-stand and stand-to-sit for fifteen times. A comparison was done between calculated joint angles from the garment and generated joint angles from Kinect sensor.
Material and Method
Smart Garment Design
Smart garment was designed and developed to collect knee and ankle joint angles in daily activities. It consists of two main steps; i) textile product design, and ii) main board design. Textile product design has a tight and a belt. They were equipped with appropriate sensors, cable connections, main board and some accessories. Accelerometers were positioned on lower and upper parts of relevant joints along the same line. They were sewn on Velcro instead of sewing directly on tight to adjust the location for different users and connected to main board via cables. To cover electronic components on tight and provide aesthetic appearance, a cloth line was placed throughout the middle of the front part of legs. One side of cloth line was sewn on tight fabric for durability and Velcro was sewn inside of the other side of cloth line to mount the accelerometers at any desired points on tight. It provides easy attachment/detachment feature for electronic components. This feature also enables the garment washable as a conventional textile product. In addition to tight, a belt with a kangaroo pocket was designed to place the main board. The pocket provides aesthetic appearance like cloth line. Moreover, it is quite useful to improve comfort and mobility of user. Camera and Kinect sensor images taken from user with smart garment are given in Figure 1.

Figure 1: Camera (left) and Kinect sensor (right) images of smart garment.
Main board consists of a microcontroller (Mbed NXP LPC1768), accelerometers, SD card module and a battery unit. Microcontroller collects raw accelerometer data during the motion and stores in memory card with 50Hz sampling rate. It communicates with accelerometers on I2C bus and SD card module on SPI bus.
Triple axis accelerometers were used to obtain joint angles. Sensors were calibrated to compensate offset in standing position before each data collection process. The obtained raw values from the accelerometers were divided by the sensitivity scale factor to get the value in terms of ‘g’. After the process of data collection a low-pass filter was applied on outputs to eliminate noise problem of accelerometers, which may occur during the processes.
Accelerometer outputs in terms of ‘g’ values were used to create vector at instant time. Each joint has two vectors, which was created from the accelerometers placed on upper and lower parts of relevant joint. These vectors were used in scalar product formula to calculate joint angles. Angles were obtained in terms of degrees. Scalar product formula is given in Equation 1.
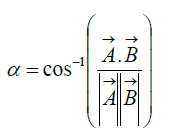 (1)
(1)
Data Collection
Five subjects (3 males and 2 females) from Dokuz Eylul University with age ranging from 20 to 35 (mean 30 ± 3.6), height 160-192 cm (mean 175 ± 3.4) and body mass 52-85 kg (mean 70 ± 3.2) participated in data collection process. They performed daily activities consist of walking on the ground, sit-to-stand and stand-to-sit processes. Each one made a practice for approximately 2 minutes to acquire reliable data sets. Subjects have neither injury nor gait abnormality.
Results and Discussion
To examine the performance of designed system, Microsoft Kinect sensor was taken as a reference platform. Specific daily activities including walking on the ground, sit-to-stand, and standto- sit were chosen for test processes. Subjects after wearing the smart garment performed these activities in front of the Kinect sensor. Knee and ankle joint angles were recorded by both systems. Obtained joint angles for each process were shown in Figures 2 and 3. Since right and left leg have similar outputs for ankle and knee joint angles, only right leg joint angles are given in the figures.

Figure 2: Comparison of obtained joint angles from both smart garment and Microsoft Kinect during sit-to-stand and stand-to-sit.

Figure 3: Comparison of obtained joint angles from both smart garment and Microsoft Kinect during walking on ground.
As shown in the figures, joint angles from smart garment have similar outputs with Kinect sensor. To make a more clear comparison, Kinect sensor was taken as reference device and the difference between outputs of these systems was calculated in terms of mean absolute percentage error (MAPE). The error rates were obtained from data collected over two minutes. The results are given in Table 1.
| Knee Angle | Ankle Angle | Average Error Rate | |
|---|---|---|---|
| Right Leg | |||
| Sit-to-stand and Stand-to-sit | 2.08% | 0.5% | 1.29% |
| Walking on Ground | 4.19% | 2.17% | 3.18% |
| Left Leg | |||
| Sit-to-stand and Stand-to-sit | 2.21% | 0.34% | 1.275% |
| Walking on Ground | 4.08% | 2.19% | 3.135% |
| Total Average Error Rate | 3.14% | 1.3% | 2.22% |
Table 1: Comparison of obtained joint angles from smart garment and Microsoft Kinect sensor (reference) in terms of MAPE.
Conclusion
In this paper, a smart garment for gait analysis has been presented. Smart garment was designed as similar as possible to conventional textile clothing to provide washability and maximum comfort to user. These features make the garment feasible for collecting relevant joint angles in daily activities and outdoor conditions. Wearing the garment is quite easy and there is no need any preparation time. Furthermore, presented garment is low-cost and suitable for mass production. The results demonstrated that the present system can be used to collect knee and ankle joint angles during walking on the ground, sit-tostand and stand-to-sit processes.
In further studies, it is planned to determine gait abnormalities, classify daily activities of users and detect gait phase using artificial intelligence.
References
- North K, Potter MQ, Kubiak EN, Bamberg SJM, Hitchcock RW (2012) The effect of partial weight bearing in a walking boot on plantar pressure distribution and center of pressure. Gait Posture 36: 646-649.
- Stone EE, Skubic M, Back J, Stone EE, Skubic M, et al. (2014) Automated health alerts from kinect-based in-home gait measurements.
- Turcot K, Aissaoui R, Boivin K, Pelletier M, Hagemeister N, et al. (2008) New accelerometric method to discriminate between asymptomatic subjects and patients with medial knee osteoarthritis during 3-D gait, IEEE Transactions on Biomedical Engineering 55: 1415-1422.
- Belda Lois JM, Mena del Horno S, Bermejo Bosch I, Moreno JC, Pons JL, et al. (2011) Rehabilitation of gait after stroke: a review towards a top-down approach, J Neuroeng Rehabil 8: 66-85.
- Cancela J, Pastorino M, Arredondo MT, Nikita KS, Villagra F, et al. (2014) Feasibility study of a wearable system based on a wireless body area network for gait assessment in Parkinson’s disease patients. Sensors 14: 4618-4633.
- Cippitelli E, Gasparrini S, Spinsante S, Gambi E (2015) Kinect as a tool for gait analysis: validation of a real-time joint extraction algorithm working in side view. Sensors 15: 1417-1434.
- Gabel M, Gilad Bachrach R, Renshaw E, Schuster A (2012) Full body gait analysis with Kinect.
- Preis J, Kessel M, Werner M, Linnhoff Popien C (2012) Gait recognition with Kinect, In 1st International Workshop on Kinect in Pervasive Computing.
- Liu T, Inoue Y, Shibata K (2010) A wearable ground reaction force sensor system and its application to the measurement of extrinsic gait variability. Sensors 10: 10240-10255.
- Crea S, Donati M, De Rossi SMM, Oddo CM, Vitiello N (2014) A wireless flexible sensorized insole for gait analysis. Sensors 14: 1073-1093.
- Xu W, Huang MC, Amini N, Liu JJ, He L, et al. (2012) Smart insole: A wearable system for gait analysis.